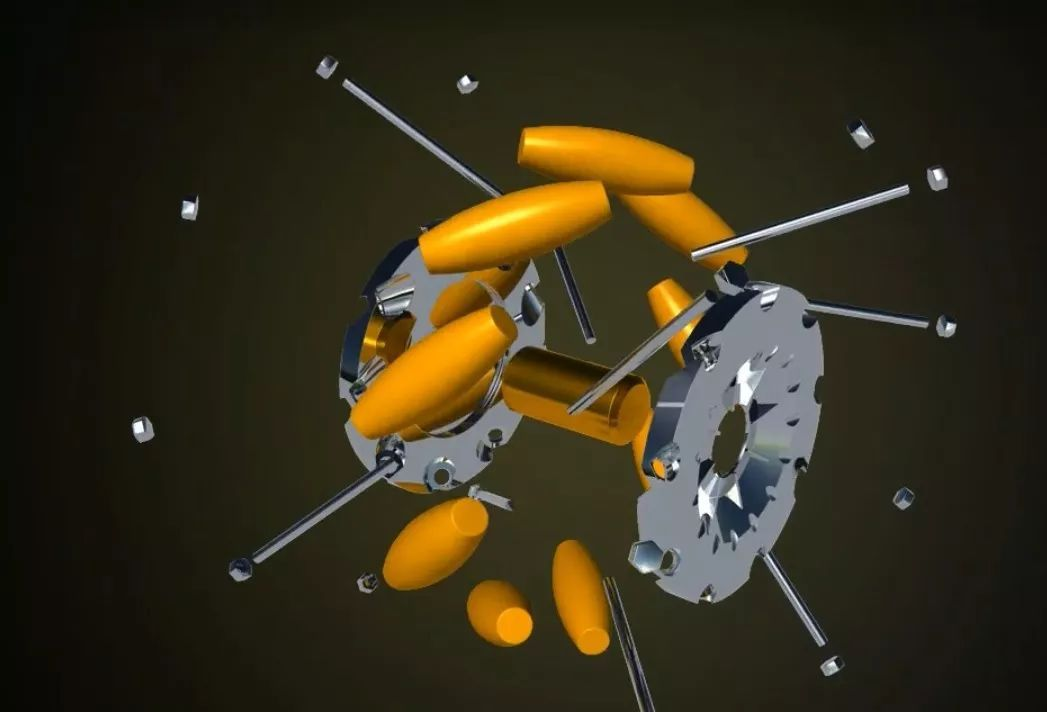
麦克纳姆轮外形结构下图,瑞典麦克那姆公司发明的一种全方位移动轮式结构,由基于主体轮辋和一组均匀排布在轮毂周围的回转辊(gǔn)子组成,且辊子轴线与轮毂轴线呈一定角度(一般为 45°),小辊子的母线是等速螺旋线或椭圆弧近似而成,当轮子绕着轮毂轴线转动时,周边各小辊子的外包络线为圆柱面,因此该轮可以连续地向前滚动。  由轮毂,辊子构成,部分含有减震环(或减震装置),轮毂轴线与辊子轴线成45度夹角。内部结构图如下
由轮毂,辊子构成,部分含有减震环(或减震装置),轮毂轴线与辊子轴线成45度夹角。内部结构图如下 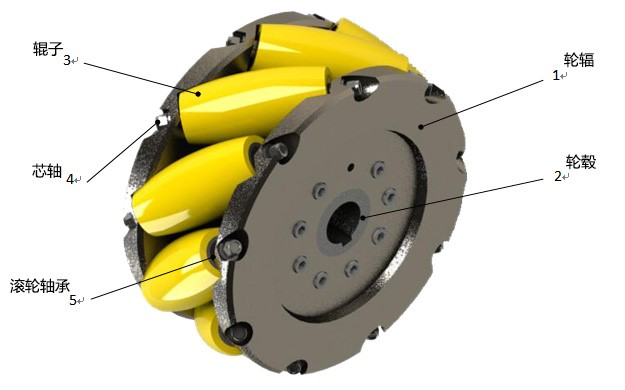
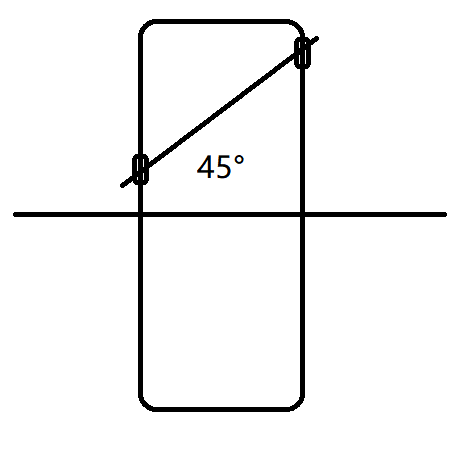
麦克纳姆轮根据夹角45°,可以分为互为镜像关系的A轮和B轮。由速度的正向分解,A轮可以分解为轴向向左和向前的力。A轮辊子轴与轮毂轴夹角+45°,B轮辊子轴与轮毂轴夹角-45° 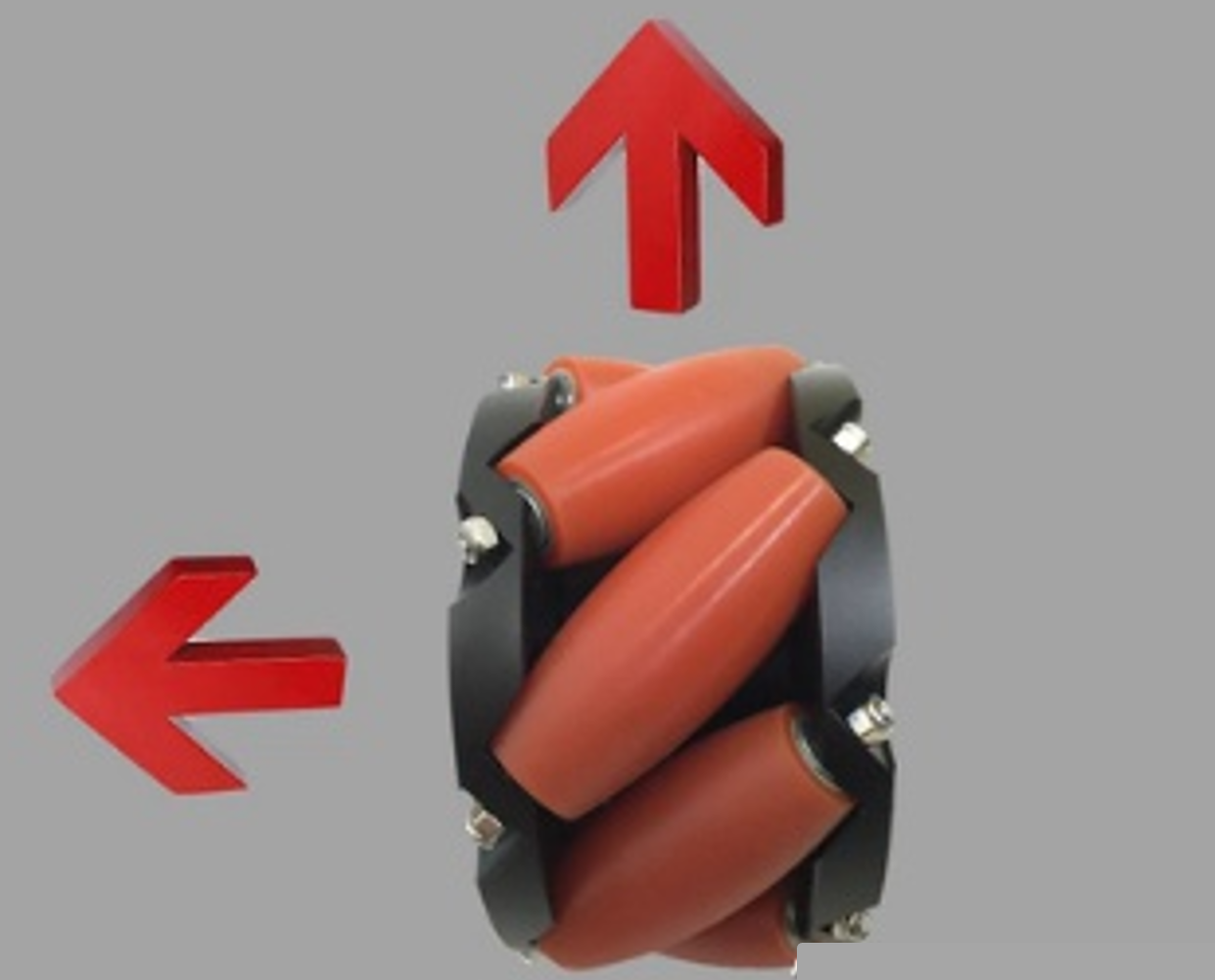
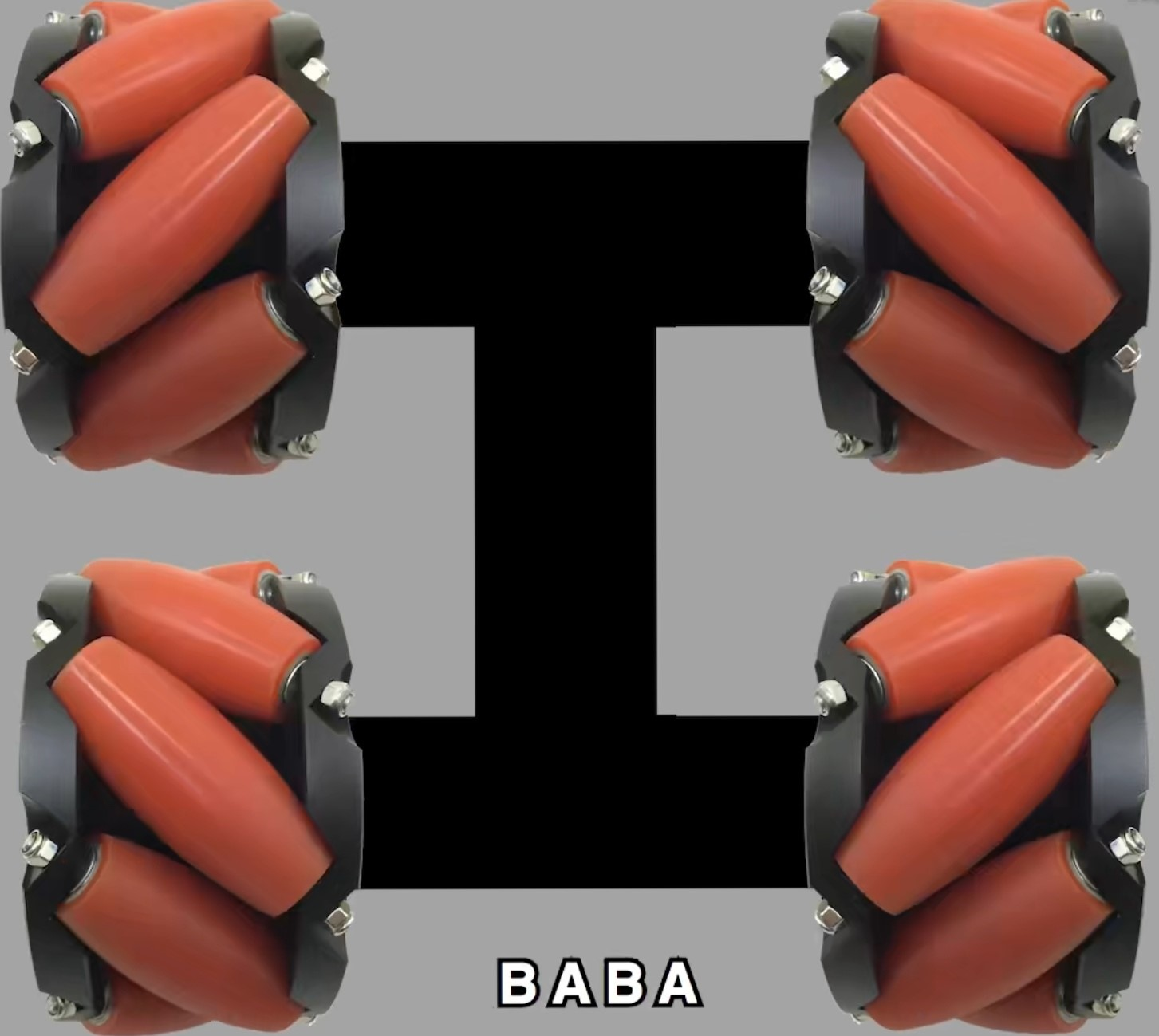
实现万向轮需要满足(逆时针)‘ABAB’(X型布局)或‘BABA’(O型布局)的排列,即对角线相同 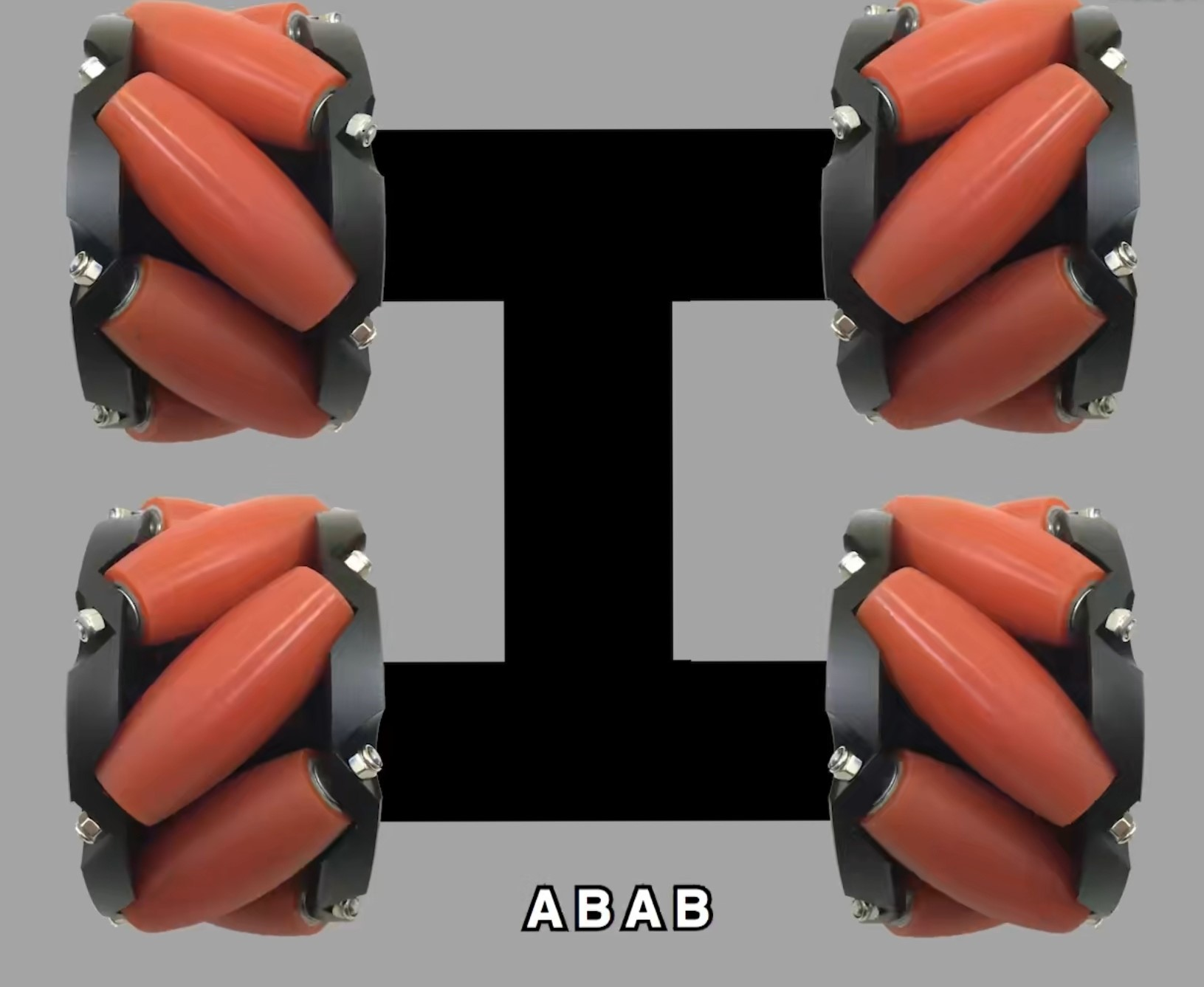
 麦克纳姆轮的布局主要分为: X-正方形(X-square)、X-长方形(X-rectangle)、O-正方形(O-square)、O-长方形(O-rectangle) 其中 X 和 O 表示的是与四个轮子地面接触的辊子所形成的图形;正方形与长方形指的是四个轮子与地面接触点所围成的形状
麦克纳姆轮的布局主要分为: X-正方形(X-square)、X-长方形(X-rectangle)、O-正方形(O-square)、O-长方形(O-rectangle) 其中 X 和 O 表示的是与四个轮子地面接触的辊子所形成的图形;正方形与长方形指的是四个轮子与地面接触点所围成的形状 
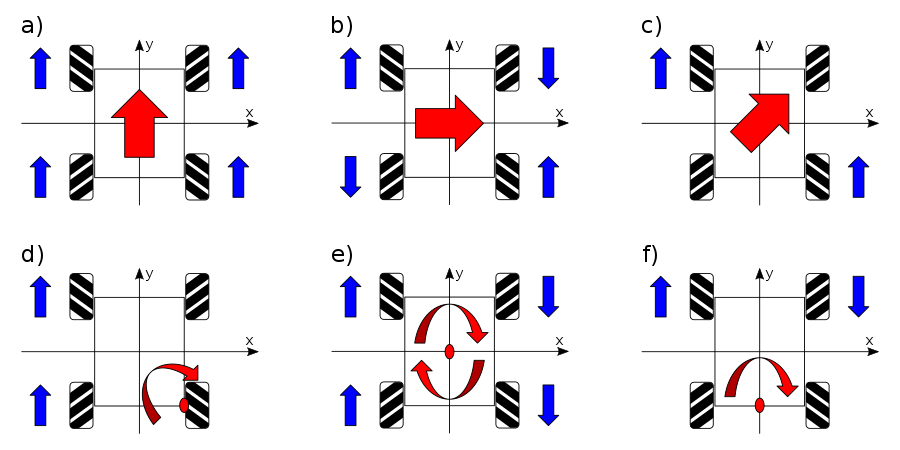
X-正方形:当主轮在电机转矩的驱动下,主轮转动产生的力矩经摩擦力分解后,辊子分解力一部分垂直于辊子,一部分沿辊子轴线,这两部分摩擦力垂直方向的另辊子空转,浪费力,而沿着辊子轴线的力则可以起到驱动小车运动,因此在X-正方形中,红色箭头表示有效摩擦力,因此在水平方向的摩擦力会被抵消,而向前的摩擦力则驱动整个底盘向前运动。  当进行旋转运动时,发现无论摩擦力朝向怎么排布,摩擦力始终都会经过会经过同一个点,所以无法保证底盘可以绕中心旋转一定的角度,这很大程度限制了麦轮的活动特性,因此很少使用这种排布方式
当进行旋转运动时,发现无论摩擦力朝向怎么排布,摩擦力始终都会经过会经过同一个点,所以无法保证底盘可以绕中心旋转一定的角度,这很大程度限制了麦轮的活动特性,因此很少使用这种排布方式
X-长方形:轮子转动可以产生 yaw 轴转动力矩,但转动力矩的力臂一般会比较短。这种安装方式也不多见。
O-正方形:四个轮子位于正方形的四个顶点,平移和旋转都没有任何问题。受限于机器人底盘的形状、尺寸等因素,这种安装方式虽然理想,但可遇而不可求。
O-长方形:轮子转动可以产生 yaw 轴转动力矩,而且转动力矩的力臂也比较长。是最常见的安装方式
4.底盘设计 1.麦克纳姆轮尺寸QMA系列全向轮是轻负载的45°全向轮。轮毂使用钢板冲压成型,坚固而轻便,每个小轮子内嵌两个轴承,滚动平稳顺滑。参数及